
Submersibles Through Time
About 99 percent of our planet's living space lies underwater,
with a dizzying variety of organisms thriving from the surface
to the scorching waters of our deepest ocean vents miles
below. Submersibles, not surprisingly, have played a key role
in exploring and understanding this last frontier. Reaching
astounding depths and capable of performing complicated
scientific experiments, these advanced craft have even begun
to tease out clues to the origin of life and the formation of
our planet. In this time line, see just how imaginatively
these underwater dream machines have evolved over the
decades.—Rima Chaddha

|
|
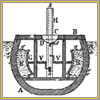
The world's first submersible (1620)
Records show that British carpenter and gunner William
Bourne designed the world's first truly submersible boat
as early as 1578, but it was not until Dutch physicist
Cornelius Drebbel modified Bourne's plans 40 years later
that the man-powered submarine finally came into
existence. Shaped like an enclosed rowboat, the vessel
included ballast tanks for stability and a system of
screws for managing the amount of water in her tanks,
enabling the submersible to sink or rise. Complete with
six oars (and 12 oarsmen) for propulsion, a snorkel-like
apparatus for air, and leather hides for waterproofing,
Drebbel's third version of this contraption could
descend to a depth of 15 feet, allowing it to travel
down the Thames River.
|

|
|
The bathysphere (1930)
While many of the world's navies have long used highly
developed submarines in military operations, scientists
began their underwater exploration with more primitive
vessels. These early manned submersibles were often
heavy, cramped metal containers, dangled like anchors
into the sea. In 1930, William Beebe (left) and Otis
Barton (right) became the first humans to observe the
deep ocean in their newly designed bathysphere, gazing
through quartz-glass portholes three inches thick. By
1934, the team reached a world-record depth of 3,028
feet, more than twice as deep as their previous dives.
|

|
|
Trieste (1953)
An untethered, deep-diving bathyscaphe (literally "deep
boat"), Trieste was the brainchild of Swiss
inventor August Piccard, who in the 1930s reached
unprecedented altitudes of almost 52,000 feet with his
unique pressurized aluminum gondola. Piccard modified
his atmospheric balloon concepts to design the
Trieste, using gasoline, which is lighter than
water, for buoyancy. In 1960, the submersible dove more
than 35,000 feet to the deepest point on Earth, the
Marianas Trench, withstanding a crushing pressure of
eight tons per square inch.
|
|
|
Alvin (1964)
As the oldest manned research submersible still in
operation, Alvin boasts an impressive
résumé. Having logged over 4,000 dives so
far, the titanium sphere was the first manned vessel to
visit the wreckage of the RMS Titanic.
Alvin has also helped researchers discover
approximately 300 new animal species, including
foot-long clams and giant red-tipped tubeworms. Thought
lost in 1968 when her support cables failed and her crew
abandoned ship, the craft spent 11 months on the
seafloor, sustaining only minor damage. Near-freezing
temperatures and a lack of oxygen kept even the lunches
left onboard perfectly preserved—if a bit damp.
|
|
|
Johnson Sea-Link (1971)
The Johnson Sea-Link class of highly maneuverable
vessels can accommodate up to four people each in dives
of as deep as 3,000 feet, but its chief claim to fame is
its use of highly specialized equipment. Using
manipulator arms, suction devices, and rotating
sample-collection tools, the futuristic
Sea-Link makes it possible for crew members to
execute from within the submersible nearly every task
once performed by divers. Equipped with sonar,
laser-aimed cameras with arc lights, and a
five-foot-wide acrylic viewing sphere, the
Sea-Link is a proven research vessel.
|

|
|
Clelia (1976)
This "yellow submarine" has a lot of sensitive equipment
on board, but she's more durable than she looks.
Clelia is designed to withstand possible tumbling
and turning in waves of up to six feet, even with a full
crew onboard, yet can be balanced underwater to provide
researchers with an exceptionally stable platform from
which to observe. Equipped with sophisticated cameras
and 500-watt metal halide lights, Clelia assisted
scientists trying to determine why the 729-foot iron-ore
carrier, the Edmund-Fitzgerald, sank to the
bottom of Lake Superior in 1975.
|

|
|
Mir I and II (1987)
Slow-moving and battery-operated, the Mir I and
II are nevertheless two of the deepest-diving
vessels in the world. Able to descend nearly 20,000
feet, they can access up to 98 percent of the world's
oceans, making them ideal for everything from research
to underwater filmmaking. In fact, director James
Cameron took advantage of the submersibles' 5,000-watt
lights when filming his blockbuster movie
Titanic. Despite stretching over 25 feet long,
each Mir has a personal sphere just seven feet in
diameter for her three-person crew.
|

|
|
Autonomous Benthic Explorer (ABE) (early 1990s)
The first underwater vehicle of her kind, the
ABE is a true robot, operating autonomously with
no onboard crew or tethers to guide her. While the
small, seven-foot-long vessel moves at a maximum rate of
just two knots, she can cover large areas of underwater
terrain as deep as 16,500 feet for months at a time, a
task that would prove prohibitively expensive if
attempted with manned or tethered machines. The
ABE is programmed to perform several tasks on her
own, such as navigating, taking photographs, collecting
data and samples, even powering down or "sleeping."
|

|
|
Deep Flight I (1996)
Don't let the name—or the look—fool you.
Deep Flight I's aeronautical-like design is ideal
for the water. Forgoing the more traditional ballast
systems used to sink and raise most submersibles, this
vessel has short, inverted wings providing the "negative
lift" needed to pull her downward at a rate of up to 12
knots. Deep Flight I is equipped to carry
high-definition and IMAX video cameras, and is designed
for deep ocean access. To operate the craft, a single
pilot lies on his or her stomach, controlling the
submersible with joysticks.
|

|
|
DeepWorker 2000 (1997)
Affectionately dubbed an "underwater sports car,"
DeepWorker 2000 is compact and relatively
lightweight at 1.3 tons. Diver Phil Nuytten (pictured
here) designed the craft to give researchers the ability
to move as freely as scuba divers yet to far greater
depths (2,000 feet). DeepWorker 2000 is
controlled by a single pilot who serves as data
collector, navigator, and camera operator. Steering the
vessel with foot pedals, the pilot performs other
tasks—such as cutting cables, lifting objects, and
operating scientific instruments—using manipulator
arms, which are jointed like human arms to allow for
freer motion.
|

|
|
ROV Hercules (2003)
Scientists designed this remotely operated craft chiefly
to study and recover artifacts from ancient shipwrecks,
but Hercules can be used for a wide array of
scientific purposes. Armed with a flexible set of
multipurpose tools, one of the craft's two manipulator
arms offers "force feedback," allowing operators miles
away to better control the pressure the device applies
upon more delicate specimens, such as boxes found aboard
the RMS Titanic (pictured here). Equipped with a
flotation device composed of glass and epoxy resin,
Hercules can "fly" in any direction like a
helicopter and will float gently to the surface if her
thrusters stop turning, an innovation that could prove
useful for future submersibles.
|
|
|
